Project Description
For the past few years Unmanned Aerial Vehicles (UAVs) have attracted the interest of many enterprise fields, becoming a powerful tool for professionals to acquire data in a fast and efficient way. As a result of this all the more growing interest on this direction, there are now available a lot of commercial UAVs, specialized in enterprise use. To cope with all these aerial devices, a range of software platforms that automate the procedure of flying, acquiring and processing data has been developed as well. These platforms take advantage of existing Coverage Path Planning (CPP) algorithms, in order to collect data from the selected regions of interest (ROIs) in a uniform way. The collected data can then be processed and get combined, to create high-resolution united sensors’ readings of the overall scanned areas. This way, UAVs provide a very powerful, high-resolution, remote sensing tool, that can be used to collect very accurate data, out of relatively small areas, where the resolution of the upper-level remote sensing platforms (such as the satellites) do not suffice for a certain application.
In general, the CPP refers to the task where one or more unmanned vehicles, equipped with a specific sensor or tool need to pass through every point of a user-defined region, in order to collect data or perform a task. The generated paths need to respect the motional capabilities and limitations of the vehicle(s) used, as well as the specifications of the sensor or tool that is used, in order to have a mission that can be executed and perform the task efficiently in real-world conditions. In the context of CALLISTO project, CERTH has developed a novel Coverage Path Planning solution, optimized for safe and efficient mutli-UAV missions (mCPP). The novel mCPP algorithm provided in the project, supports convex and very complex-shaped concave ROIs, as well as the definition of no-fly-zones (NFZs) and obstacles inside the operational area. In addition, it manages wisely the operational resources, as it guarantees no backtracking and redundant movements that do not contribute to the coverage procedure, reduced paths’ length and number of turns, as well as reduced overall duration of the missions. Figure 1 shows an example of a coverage mission for 10 UAVs, in a very-complex shaped ROI, including 2 NFZs.

Figure 1: Coverage paths for 10 UAVs in a very complex-shaped ROI, including no-fly-zones, generated by the algorithm that is used in the CALLISTO project
The mCPP methodology expects as an input:
- A user-defined polygon-ROI probably including NFZs/obstacles
- The desired scanning density (distance between sequential scans)
- The number of participating vehicles
- The initial positions of the vehicles
- (Optionally) the percentage of the overall ROI that each vehicle should undertake
The algorithm processes this information and generates as an output a set of waypoints for each vehicle participating, in order to cooperatively cover the overall ROI. Figure 2 presents in a diagram the flow of information that takes place in the CPP methodology that is used in the project. More information about the CPP method can be found in the scientific paper [1] that has been published.
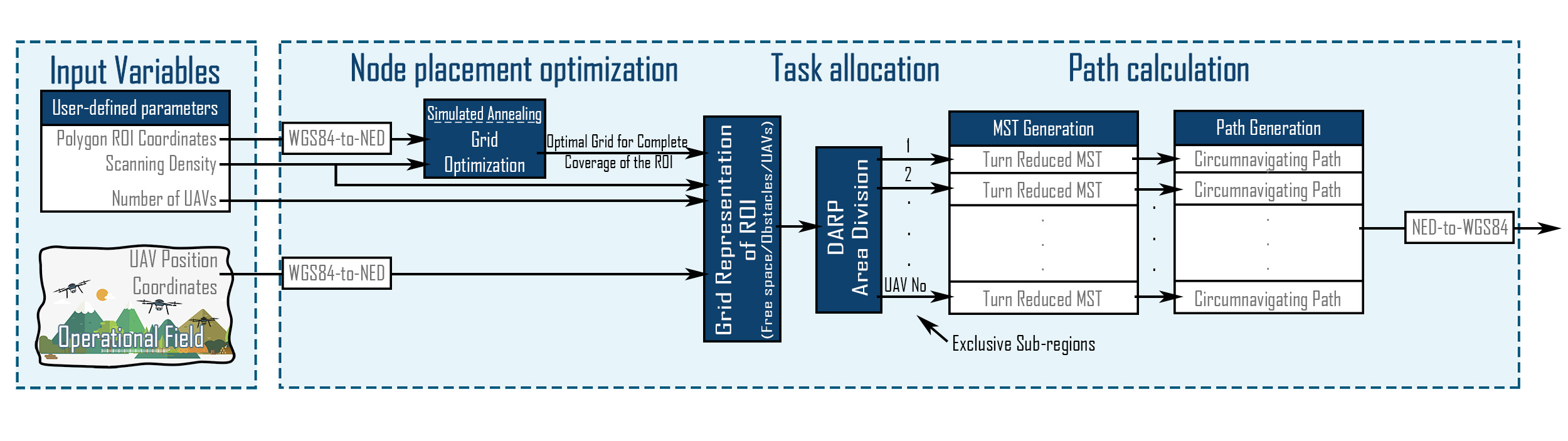
Figure 2: Data-flow of the mCPP method
The developed solution can be used in a wide range of enterprise applications, such us precision agriculture, agricultural fields, infrastructure inspections, search and rescue operations. The acquired data can be used to create 2D and 3D representations of the desired ROI, either generic, or tailored to specific applications, such as orthomosaics, contour maps, elevation models, plant health maps, 3D pointclouds and 3D meshes. Figure 3 shows some indicative results generated by data that were acquired on a coverage mission with the algorithm that is used in the CALLISTO project.
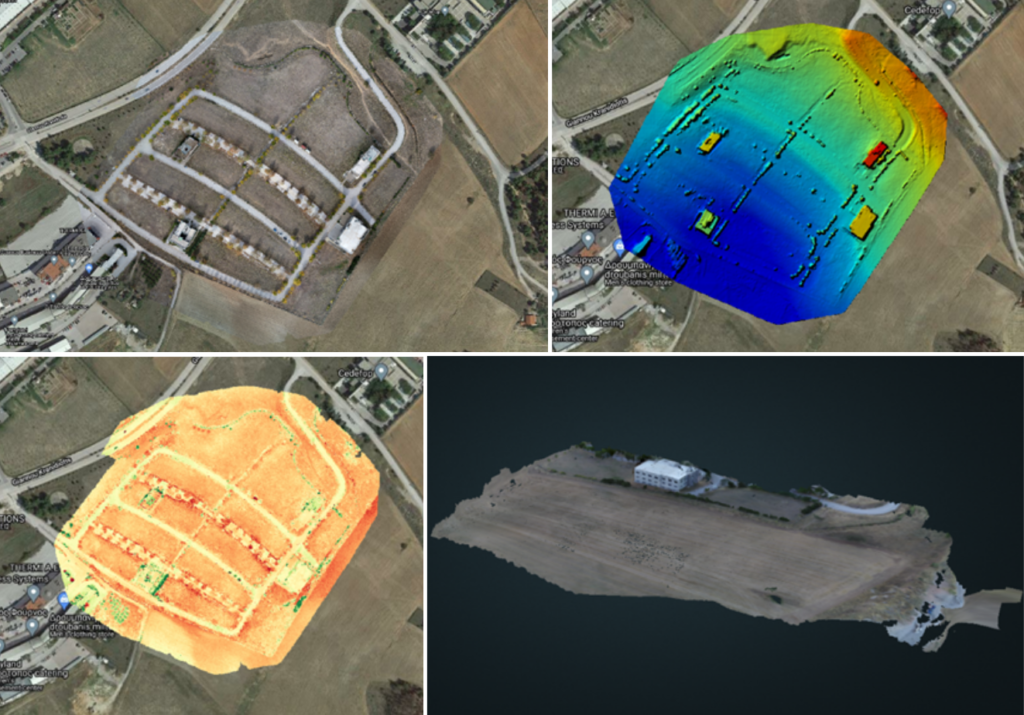
Figure 3: Indicative results generated by data collected on a coverage mission with the CPP algorithm that is used in the project: a) Othromosaic (orthocorectified 2D map) b) Elevation map c) Health plant map d) 3D representation of the scanned region
In the context of the CALLISTO project, this path planning solution can be used to acquire very high-resolution imagery of the ROIs where the satellite data cannot provide great confidence in the predictions of the Artificial Intelligence processing models used.
[1] Apostolidis, S. D., Kapoutsis, P. C., Kapoutsis, A. C., & Kosmatopoulos, E. B. (2022). Cooperative multi-UAV coverage mission planning platform for remote sensing applications. Autonomous Robots, 1-28.
Project Details
- DateSeptember 30, 2022
- WriterScientific & Technical management team, CERTH
- 1
